ROS (Robot Operating System) je open-source projekt, který poskytuje rámec a nástroje pro robotické aplikace. Pomáhá navrhovat složitý software, aniž byste věděli, jak určitý hardware funguje.
Noetický je LTS vydání ROS a přizpůsobené pro Ubuntu 20.04. Podpora ROS Noetic je až do roku 2025 (5 let). Podporované architektury jsou amd64, armhf a arm64.
V tomto tutoriálu si projdeme, jak instalovat ROS Noetic na Ubuntu 20.04 .
1. Přidejte oficiální repo Noetic do Ubuntu
Prvním krokem při instalaci ROS Noetic je přidání oficiálního úložiště ROS Noetic do souboru se seznamem zdrojů Ubuntu 20.04.
Chcete-li přidat úložiště Noetic, zadejte:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.listVýstup:
deb http://packages.ros.org/ros/ubuntu focal main.2. Přidejte oficiální klíčenku ROS
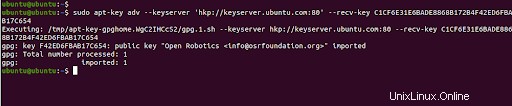
Dále přidejte oficiální klíčenku ROS do svého systému Ubuntu 20.04. Existují dva způsoby, jak toho dosáhnout.
První metodou je použití hkp://keyserver.ubuntu.com:80 Server klíčů Ubuntu. Pokud to nefunguje, můžete jej zkusit nahradit hkp://pgp.mit.edu:80 . Spusťte tedy níže uvedený příkaz.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Druhou metodou je použití příkazu curl ke stažení oficiálního svazku klíčů ROS a jeho přidání lokálně.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -Výstup „OK“ znamená, že klíč byl úspěšně přidán.
3. Aktualizujte index balíčku ROS
Dále aktualizujeme náš systém Ubuntu, abychom získali informace o balíčku ROS Noetic z úložiště.
$ sudo apt updateTím se synchronizuje nově přidaný repozitář s online repozitáři Ubuntu.
4. Nainstalujte ROS Noetic na Ubuntu 20.04
ROS má několik metabalíčků, které si můžete nainstalovat podle svých specifických potřeb.
Níže jsou uvedeny oficiální metabalíky ROS Noetic:
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Vyberte si preferovaný metabalíček a nainstalujte jej pomocí některého z níže uvedených příkazů.
Instalovat ros-noetic-desktop-full
Balíček ros-noetic-desktop-full obsahuje všechny balíčky v ros-noetic-desktop a také balíčky vnímání (ros-noetic-perception) a simulace (ros-noetic-simulators).
Chcete-li nainstalovat ros-noetic-desktop-full, spusťte následující příkaz:
$ sudo apt install ros-noetic-desktop-fullPo spuštění příkazu stiskněte Y pokračovat v instalaci.
Nainstalovat ros-noetic-desktop
Ros-noetic-desktop je minimální verze ros-noetic-desktop-full. Obsahuje většinu výukových balíčků včetně:
- vis
- úhly
- common_tutorials
- geometry_tutorials
- ros_tutorials
- roslint
- urdf_tutorial
- návody na vizualizaci
Chcete-li nainstalovat ros-noetic-desktop, spusťte následující příkaz:
$ sudo apt install ros-noetic-desktopInstalovat ros-noetic-base
Ros-noetic-base obsahuje pouze základní balíčky. Zahrnuje balíčky v ros_core a další základní nerobotické nástroje, jako je dynamická rekonfigurace, nodelets a actionlib.
Chcete-li nainstalovat ros-noetic-base, spusťte následující příkaz:
$ sudo apt install ros-noetic-baseInstalovat ros-noetic-core
Ros-noetic-core obsahuje kolekci minimálních balíčků. Balíčky obsahují:
- common_msgs
- gencpp
- rod
- genlisp
- genmsg
- gennodejs
- genpy
- generování zpráv
- message_runtime
- pluginlib
- ros
- ros_comm
- rosbag_migration_rule
- rosconsole
Chcete-li nainstalovat ros-noetic-core, spusťte následující příkaz:
$ sudo apt install ros-noetic-core5. Nastavte prostředí ROS Noetic
Dalším krokem je nastavení prostředí ROS Noetic. Nejprve zadejte skript setup.bash v každém bash terminálu, který používá ROS, zadejte:
$ source /opt/ros/noetic/setup.bashPřidejte soubor .bashrc umístěný ve vašem domovském adresáři, abyste se vyhnuli spuštění pokaždé, když spustíte nový shell:
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcOvěřte spuštěním následujícího příkazu:
$ tail ~/.bashrc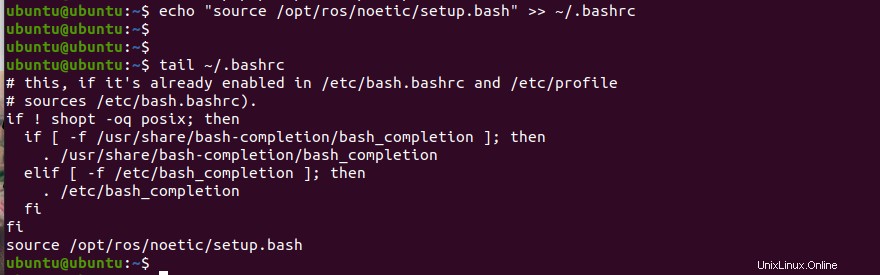
Aby se změny projevily, zadejte:
$ source ~/.bashrc Ověřte instalaci Noetic
Po úspěšné instalaci ROS Noetic na Ubuntu 20.04 jednoduše spusťte příkaz roscd.
$ roscdVšimnete si, že aktuální adresář vaší výzvy se změní na /opt/ros/noetic , kde jsme nainstalovali Noetic.

Instalaci můžeme také ověřit spuštěním roscore příkaz v adresáři noetic. Výstup zobrazí ros distro a verzi ros v souhrnu.
$ roscore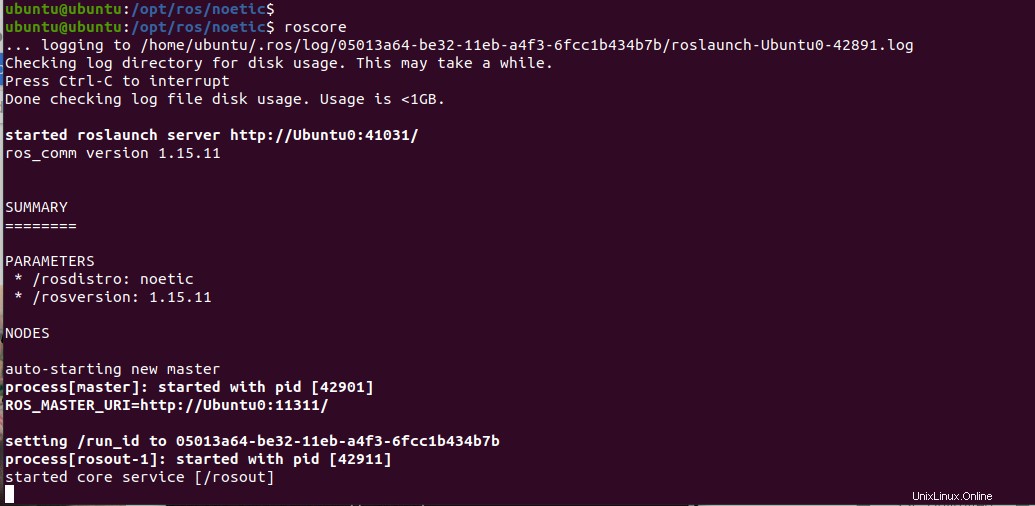
Závěr
V tomto tutoriálu jsme se naučili, jak nainstalovat ROS Noetic na Ubuntu 20.04. Nyní můžete naprogramovat své roboty pomocí Noetic.